Software Design for the “node” Robot
Designing the Human-Machine Interaction Framework to Plan All Activities Performed by a Robot

Cliente
Request
Node is a robot designed for the automated handling of loads and information in the industrial field, particularly in environments with high variability where processes still rely heavily on human decisions and operations. This means it must effectively interact not only with its surrounding environment but also, and primarily, with humans. People often resist complex solutions because they can impact productivity and require new technical skills that may only sometimes be available.
Node’s ability to establish quick and intuitive relationships with humans is essential to ensure smooth and safe operations, optimizing workflow and facilitating integration into the production environment.
Vision
- Intelligence
Rethink the role of robots as intelligent agents rather than mere supporters or substitutes for human action. Mapping and improving production line processes affect operational efficiency and production planning. - Trust
Node’s presence in the industrial context is based on trust, as it redefines the unwritten rules underpinning the archetype of competition between humans and machines. - Innovation
The product focuses on reducing waste and optimizing processes rather than merely increasing production capacity.
Solution
Methodology
- Ecosystem mapping
- Collaborative design
- Agile approach
- UX/UI, UX Writing
- Prototyping
- Usability testing
Services involved
- Collaborative design
- UX/UI
Technology
- Paper and pen
- Cardboard and markers
- Mural
- Balsamiq
- Figma
Need support for your project?
Process
Ecosystemic Approach
We organized multiple workshops with the client to map the relationships between the robot’s software (node) and the environment, including people, services, and spaces. Our activity focused on numerous touchpoints, such as the handling system and communication devices like lights, sound signals, and other emitters. By considering the entire ecosystem, we examined all the elements influencing both the node system and the relationships needed to design such software. This approach allowed us to gain a deep understanding of the full scope of human-machine interactions.
Collaborative Design
The workshops, along with various iterations with end-users, including the use of depth diagrams and usability testing, allowed us to transform simple wireframes created with Balsamiq into a final solution ready for development.
Additionally, we developed a design system – a structured set of rules and guidelines designed to ensure consistency and uniformity across the entire digital ecosystem. This comprehensive system remains available for the client.
Agile approach
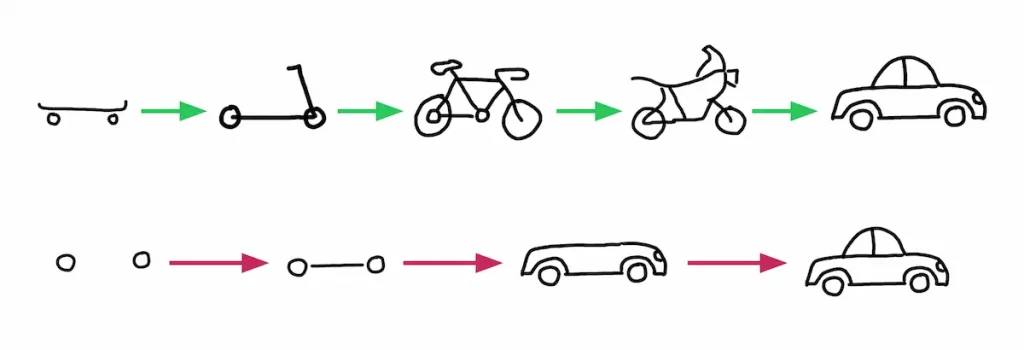
Given the project’s high complexity, a waterfall approach – completing one feature at a time – would not have been effective. It would be akin to building a car by first assembling the wheels, then the chassis, and finally the bodywork, leaving the user without transportation until the entire process is complete.
To address this, we adopted an iterative product refinement approach. The MVPs (Minimum Viable Products) were preliminary versions of the product that, while not fully functional, still allowed the user to achieve their primary goal: mobility. To define the MVP, we used an impact-effort matrix to prioritize activities by assessing the value generated (impact) against the resources required (effort), enabling quick strategic decisions.
During software development, we followed an Agile approach to immediately consolidate fundamental functionalities – the features that justify the product’s existence. This ensured that the product truly met its intended purpose, making it appealing to the market.
UX/UI
In an initial workshop, we identified user needs and grouped them in another session using the Affinity Diagram, a technique for organizing ideas, problems, and solutions into logically connected groups. This method helped us categorize and structure a large volume of often ambiguous or fragmented information into coherent clusters.
We also used Depth Diagrams (Service Blueprints), linear representations based on a timeline that detail all aspects of a service, including hardware, people, and the surrounding environment. This approach enabled us to map the scenario with a high degree of precision.
Using Mural, we visually represented user needs. Subsequently, we developed wireframes with Balsamiq to quickly and simply define the structure and layout of the interfaces. Once approved, we organized workshops to map user journeys in detail, outlining the paths users would follow to interact with the service. These workshops were critical for identifying specific interactions and potential usability issues. After defining the paths, we created detailed mockups in Figma, incorporating visual and interactive elements to realistically represent the final user experience.
The mockups were then transformed into prototypes, which we used to conduct usability tests. These tests allowed us to identify and address potential usability challenges before moving to the final development phase.
UX writing
We defined how the robot communicates with humans. The software’s interface texts were designed to engage people directly and conversationally. For instance, instead of a button labeled “START,” we opted for a more friendly message like “Let’s start collaborating together.” The interface uses a friendly tone of voice, addressing the user informally to promote a pleasant and approachable communication style.
Prototyping
We created a cardboard prototype of node to calculate and evaluate potential movements in the space and study the human-machine relationship for specific functionalities.
During this phase, we also conducted usability tests to verify the system’s intuitiveness and functionality for users. These tests allowed us to observe how people interacted with the robot, identifying potential difficulties or critical points in the user experience. Based on these results, we proposed and implemented improvements to further refine the human-machine relationship and optimize the system’s overall usability.
Results
We designed a system of human-machine interactions that enables users to efficiently plan all activities node will perform. This includes not only delivery and pickup missions but also process optimization for lean facilitators, ensuring a smooth and productive workflow.
Advantages
- Maximize performance reliability.
- Optimize processes based on data collected during missions.
- Facilitate issue management, error resolution, and bottleneck mitigation in the production line.
- Bring robotic solutions closer to the human experience, fostering greater acceptance and integration into daily activities.
Conclusion
We designed a simple, accessible interface despite the complexity of the context in which the robot operates, making it a bridge between the industrial world and everyday life.
The team’s significant effort was in creating a seamless and transparent interface for the robot while maintaining high flexibility, enabling users to operate node quickly. We delved deeply into designing a front end that allows for maximum customization without causing confusion or entropy.
Node is a product created for the B2B sector but aims to change the perception of industrial robots by building trust between humans and machines and bringing the user experience closer to that of consumer tech products.
Managing all touchpoints, and the multitude of features, and simplifying relationships was the project’s greatest challenge.
This project will participate in the UX Design Awards, showcasing outstanding user experience solutions across all fields and industries worldwide.